Запускаем серву OMRON на столе
12 July, 2019
На письменном столе подключена следующая конфигурация:
- OMRON NJ501-5300 (ПЛК с функциями motion controller) соединен кабелем Ethernet UTP5 c PC
- OMRON R88D-KNxxx (AC servo driver) соединен кабелем UTP5 по EtherCAT с головным ПЛК
- OMRON (моторчик с энкодером) специальный кабель для энкодера и силовой
Есть желание просто покрутить на столе моторчиком.
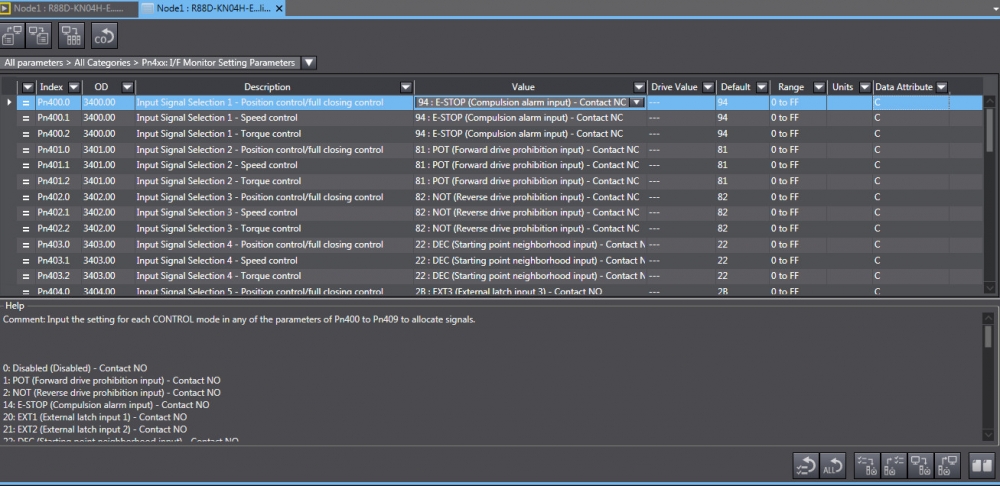
Из коробки не работает. Сразу при включении питания на серво-драйвере ошибка 87.
В параметрах R88D нужно отключить контроль запрещающих внешних сигналов:
Отключаем:
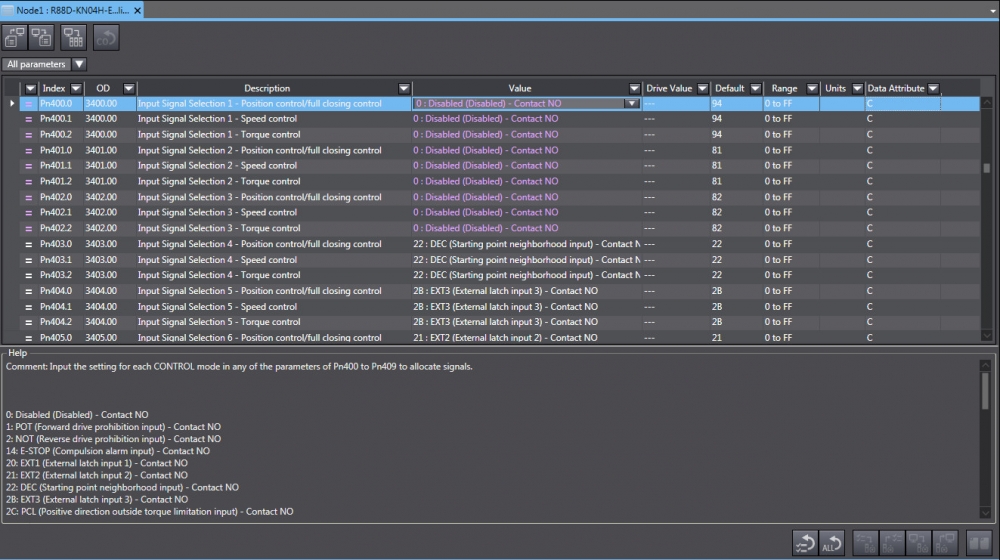
Не забываем залить изменения в драйвер. Кнопка внизу "Transfer All to Drive"
Появиться предупреждение о том, что изменения применяться только после сброса питания.
Выключаем, включаем и пробуем Test Run из контекстного меню драйвера.
Все должно крутиться :-)